Retours vers :
[Accueil]
[Sommaire du dossier]
JF Perrin mise à jour 2011
[A propos de l'auteur]
[Droits de copie]
Retours vers :
[Accueil]
[Sommaire du dossier]
JF Perrin mise à jour 2011
[A propos de l'auteur]
[Droits de copie]
Le contrôleur de la servorégulation peut commander 3 actionneurs :
- vitesse de rotation de la turbine (rpm). Dans le cas de turbines à effet de
cisaillement important (par exemple de type Rushton), l'augmentation de vitesse
de rotation permet des bulles très petites, donc une surface d'échange élevée
donc un OTR
amélioré. Mais ceci est réservé aux cultures de micro organismes peu sensibles
aux effets de cisaillement. Et gare au moussage à vitesse élevée ...
- contrôleur de débit d'aération (D, massique ou volumique) (D volumique est souvent donné en vvm, volume d'air par volume de milieu et par minute);
- électrovanne de mélange air ambiant (21 % de dioxygène) et oxygène pur (E). (par exemple, la pression totale du gaz d'aération est maintenue constante pour assurer 0,3 bar de surpression en tête de bioréacteur. Pour augmenter la pression partielle en dioxygène dans le gaz entrant - et donc C* - on joue sur la proportion de dioxygène).
Il est assez rare de cascader les 3 actionneurs, les cascades de servo régulation sont souvent hiérarchisées avec 2 actionneurs. Bien organisées, elles permettent les cultures aérobies dites à très haute densité.
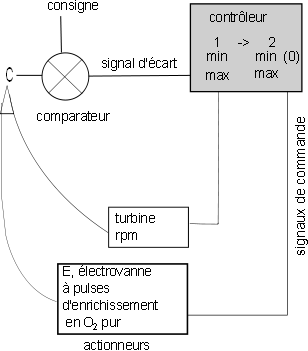
Voici un exemple avec cascade hiérarchique 1-rpm / 2-enrichissement de l'air entrant en dioxygène.
D'où le schéma : |
Au départ C est à 100%, rpm et E sont à min. Puis avec la croissance des micro organismes OUR augmente énormément et donc C va diminuer. Quand C passe sous la valeur de consigne, le contrôleur augmente rpm jusqu'à ramener C à la valeur de consigne. Si OUR est tel que rpm atteint son max et que C passe en dessous de la consigne, le contrôleur cascade sur E et enrichit en dioxygène. Si, dans le process, OUR vient à diminuer entrainant une hausse de C au dessus de la consigne, la hiérarchie du contrôleur est de diminuer d'abord l'enrichissement en dioxygène E puis rpm. |
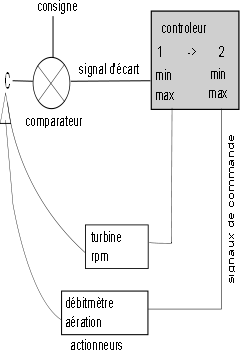
Voici un exemple avec cascade hiérarchique 1-rpm / 2-contrôleur (massique) de débit.
D'où le schéma : |
Au départ C est à 100%, rpm et D sont à min. Puis avec la croissance des micro organismes OUR augmente énormément et donc C va diminuer. Quand C passe sous la valeur de consigne, le contrôleur augmente rpm jusqu'à ramener C à la valeur de consigne. Si OUR est tel que rpm atteint son max et que C passe en dessous de la consigne, le contrôleur cascade sur D et augmente le débit. Si, dans le process, OUR vient à diminuer entrainant une hausse de C au dessus de la consigne, la hiérarchie du contrôleur est de diminuer d'abord D puis rpm. |
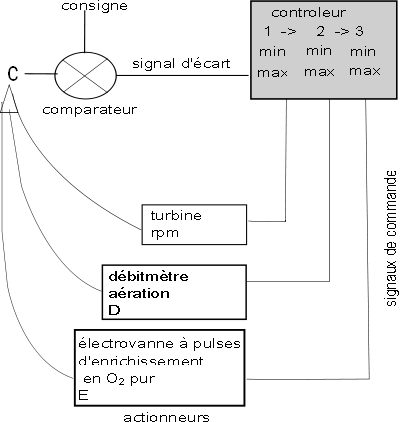
On peut évidemment sophistiquer avec cascade à 3 actionneurs, par exemple selon :
D'où le schéma :